補足2: 加速度系における潮汐力の導出
English
天体から重力を受けるだけで潮汐力が出てくることを示すため, 運動方程式から出発し, 地球に現れる潮汐力を導いてみよう。
天体としては, 月だけを考えることにする。
慣性系
まず, 慣性系での運動方程式を書いてみよう。
地球上の質点を P,
地球の中心を E,
月の中心を L とする。
また, 地球の質量を \( {M} \),
月の質量を \( {m} \),
重力定数を \( {G} \) とすると,
質点 P の運動方程式はつぎのようになる。右辺第1項は地球による重力, 第2項は月による重力だ。
\[
\frac{{{{\text{d}}^2}{{\boldsymbol{r}}_{\text{P}}}}}{{{\text{d}}{t^2}}} = - \frac{{GM}}{{{{\left| {{{\boldsymbol{r}}_{\text{P}}} - {{\boldsymbol{r}}_{\text{E}}}} \right|}^3}}}({{\boldsymbol{r}}_{\text{P}}} - {{\boldsymbol{r}}_{\text{E}}}) - \frac{{Gm}}{{{{\left| {{{\boldsymbol{r}}_{\text{P}}} - {{\boldsymbol{r}}_{\text{L}}}} \right|}^3}}}({{\boldsymbol{r}}_{\text{P}}} - {{\boldsymbol{r}}_{\text{L}}}) . \tag{1}
\]
いっぽう, 地球の中心 E の運動方程式はつぎのようになる。右辺は月による重力だ。
\[
\frac{{{{\text{d}}^2}{{\boldsymbol{r}}_{\text{E}}}}}{{{\text{d}}{t^2}}} = - \frac{{Gm}}{{{{\left| {{{\boldsymbol{r}}_{\text{E}}} - {{\boldsymbol{r}}_{\text{L}}}} \right|}^3}}}({{\boldsymbol{r}}_{\text{E}}} - {{\boldsymbol{r}}_{\text{L}}}) . \tag{2}
\]
加速度系
ここで, 式 (1) から式 (2) を引くと, 加速度運動する地球の中心 E から見た,
地球上の質点 P の運動方程式を得ることができる。
\[
\frac{{{{\text{d}}^2}\left( {{{\boldsymbol{r}}_{\text{P}}} - {{\boldsymbol{r}}_{\text{E}}}} \right)}}{{{\text{d}}{t^2}}} =
- \frac{{GM}}{{{{\left| {{{\boldsymbol{r}}_{\text{P}}} - {{\boldsymbol{r}}_{\text{E}}}} \right|}^3}}}({{\boldsymbol{r}}_{\text{P}}} - {{\boldsymbol{r}}_{\text{E}}})
- \frac{{Gm}}{{{{\left| {{{\boldsymbol{r}}_{\text{P}}} - {{\boldsymbol{r}}_{\text{L}}}} \right|}^3}}}({{\boldsymbol{r}}_{\text{P}}} - {{\boldsymbol{r}}_{\text{L}}})
+ \frac{{Gm}}{{{{\left| {{{\boldsymbol{r}}_{\text{E}}} - {{\boldsymbol{r}}_{\text{L}}}} \right|}^3}}}({{\boldsymbol{r}}_{\text{E}}} - {{\boldsymbol{r}}_{\text{L}}}) . \tag{3}
\]
 |
|
図1. 式で使った点とベクトル
|
式を簡単にするため, 地球の中心 E から見た質点 P の位置を
\({\boldsymbol{r}}\),
地球の中心 E から見た月 L の位置を
\({\boldsymbol{a}}\) とおくと,
\({{\boldsymbol{r}}_{\text{P}}} - {{\boldsymbol{r}}_{\text{E}}} = {\boldsymbol{r}}\),
\({{\boldsymbol{r}}_{\text{P}}} - {{\boldsymbol{r}}_{\text{L}}} = {\boldsymbol{r}} - {\boldsymbol{a}}\),
\({{\boldsymbol{r}}_{\text{E}}} - {{\boldsymbol{r}}_{\text{L}}} = -{\boldsymbol{a}}\)
と書けるので, 式 (3) はつぎのようになる。式 (4) 右辺の第1項は地球による重力, 第2項は月による重力, 第3項は並進慣性力だ。
\[
\frac{{{{\text{d}}^2}{\boldsymbol{r}}}}{{{\text{d}}{t^2}}} = - \frac{{GM}}{{{r^3}}}{\boldsymbol{r}} - \frac{{Gm}}{{{{\left| {{\boldsymbol{r}} - {\boldsymbol{a}}} \right|}^3}}}({\boldsymbol{r}} - {\boldsymbol{a}}) - \frac{{Gm}}{{{a^3}}}{\boldsymbol{a}} . \tag{4}
\]
ポテンシャルの式を得るために, 式 (4) の右辺を微分演算子を使って表すと, つぎのように書ける。
\[
\frac{{{{\text{d}}^2}{\boldsymbol{r}}}}{{{\text{d}}{t^2}}} =
- \frac{\partial }{\partial {\boldsymbol{r}}} \left( { - \frac{{GM}}{r}
- \frac{{Gm}}{{\sqrt {{{\left( {{\boldsymbol{r}} - {\boldsymbol{a}}} \right)}^2}} }}
+ \frac{{Gm}}{{{a^3}}}{\boldsymbol{a}} \cdot {\boldsymbol{r}}} \right) .
\tag{5}
\]
式 (5) 右辺の括弧の中が加速度運動する地球から見たポテンシャルだ。
これを \(V'\) としよう。
地球から見た月の方向, つまり \(\boldsymbol{a}\) の方向を \(x\) として, このポテンシャルを
\(x\), \(y\), \(z\)
で表すと, つぎのようになる。
\[
V' = - \frac{{GM}}{{\sqrt {{x^2} + {y^2} + {z^2}} }} - \frac{{Gm}}{{\sqrt {{{(x - a)}^2} + {y^2} + {z^2}} }} + \frac{{Gm}}{{{a^2}}}x. \tag{6}
\]
ところで,
\(x\), \(y\), \(z\) が
\(a\) と比べて十分小さいとして, 式 (6) の第2項を2次の項までの展開式で近似すると式 (7) を得る。
ここで, 式 (7) 右辺の第2項は地球の中心にはたらく月の重力を, 第3項は地球の中心にはたらく月の重力からのずれ, つまり潮汐力を表す。
\[
- \frac{{Gm}}{{\sqrt {{{(x - a)}^2} + {y^2} + {z^2}} }}
\approx - \frac{{Gm}}{a} - \frac{{Gm}}{{{a^2}}}x - \frac{{Gm}}{{{a^3}}}({x^2} - \tfrac{1}{2}{y^2} - \tfrac{1}{2}{z^2}) .
\tag{7}
\]
式 (7) を式 (6) の第2項に代入すると, 加速度系で見たポテンシャルは, 定数項を除いてつぎの式で近似できることがわかる。
\[
V' \approx - \frac{{GM}}{{\sqrt {{x^2} + {y^2} + {z^2}} }} - \frac{{Gm}}{{{a^3}}}\left( {{x^2} - \tfrac{1}{2}{y^2} - \tfrac{1}{2}{z^2}} \right) . \tag{8}
\]
けっきょく, 加速度運動する地球から見える力は, 第1項の地球自身の重力と第2項の潮汐力だけになる。
この式が, 本稿親ページの式 (5) だ。
別の近似法
上とは別の方法で, 式 (4) から潮汐力ポテンシャルを導いてみよう。
式 (4) で,
\[
\begin{align}
\frac{1}{{{{\left| {{\boldsymbol{r}} - {\boldsymbol{a}}} \right|}^3}}}
&= {\left[ {{{({\boldsymbol{r}} - {\boldsymbol{a}})}^2}} \right]^{ - 3/2}} \\
&= \frac{1}{{{a^3}}}{\left( {1 - \frac{{2{\boldsymbol{a}} \cdot {\boldsymbol{r}}}}{{{a^2}}}
+ \frac{{{r^2}}}{{{a^2}}}} \right)^{ - 3/2}} \\
&\approx \frac{1}{{{a^3}}} + \frac{{3{\boldsymbol{a}} \cdot {\boldsymbol{r}}}}{{{a^5}}} \tag{9} \\
\end{align}
\]
という近似が成り立つ。これを式 (4) に代入し, \(r\) の2次の項を落とすと,
\[
\begin{align}
\frac{{{{\text{d}}^2}{\boldsymbol{r}}}}{{{\text{d}}{t^2}}}
&\approx - \frac{{GM}}{{{r^3}}}{\boldsymbol{r}}
- \frac{{Gm}}{{{a^3}}}({\boldsymbol{r}} - {\boldsymbol{a}})
+ \frac{{3Gm({\boldsymbol{a}} \cdot {\boldsymbol{r}}){\boldsymbol{a}}}}{{{a^5}}}
- \frac{{Gm}}{{{a^3}}}{\boldsymbol{a}} \\
&= - \frac{{GM}}{{{r^3}}}{\boldsymbol{r}}
+ \frac{{Gm}}{{{a^3}}}\left[ {\frac{{3({\boldsymbol{a}} \cdot {\boldsymbol{r}}){\boldsymbol{a}}}}{{{a^2}}} - {\boldsymbol{r}}} \right].
\tag{10} \\
\end{align}
\]
これは, ポテンシャルを使ってつぎのように書くことができる。
\[
\frac{{{{\text{d}}^2}{\boldsymbol{r}}}}{{{\text{d}}{t^2}}} = - \frac{{\partial V'}}{{\partial {\boldsymbol{r}}}}. \tag{11}
\]
ただし,
\[
V' \approx - \frac{{GM}}{r} - \frac{{Gm}}{{2{a^3}}}\left[
{\frac{{3{{({\boldsymbol{a}} \cdot {\boldsymbol{r}})}^2}}}{{{a^2}}} - {r^2}} \right]. \tag{12}
\]
第1項は地球自身による重力を, 第2項は月による潮汐力を表す。
このポテンシャルを, \(\boldsymbol{a}\) の方向を \(x\) として
\(x\), \(y\), \(z\)
で表すと, 式 (8) と同じ式になる。
\[
V' \approx - \frac{{GM}}{{\sqrt {{x^2} + {y^2} + {z^2}} }} - \frac{{Gm}}{{{a^3}}}\left( {{x^2} - \tfrac{1}{2}{y^2} - \tfrac{1}{2}{z^2}} \right) .
\]
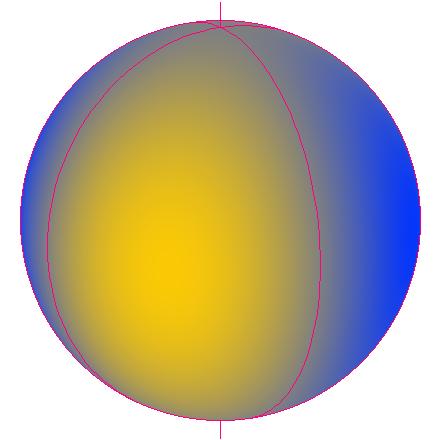
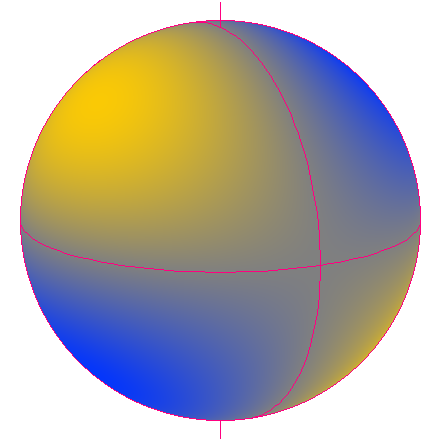
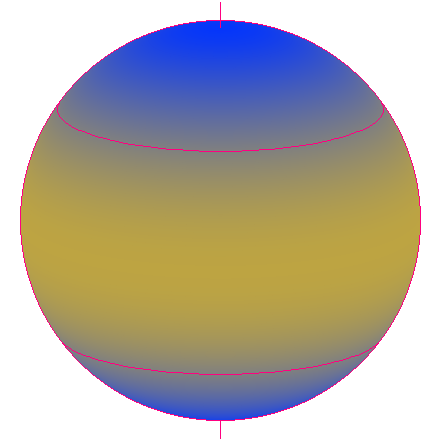
参考までに, ポテンシャル \(V'\) は, \(x = r\sin \theta \cos \varphi\),
\(y = r\sin \theta \sin \varphi\),
\(z = r\cos \theta\) と置くと, 球座標表示で書くことができる。
すなわち,
\[
V' \approx - \frac{GM}{r} - \frac{{Gm}}{{2{a^3}}}{r^2}(3{\sin ^2}\theta {\cos ^2}\varphi - 1) . \tag{13}
\]
 |
|
図2. 球座標。 月の方向を \(x\),
月の公転方向を \(y\) とする。
|
平衡潮汐論
潮汐力がないときの地球の半径を \( R \) とし,
潮汐力による等ポテンシャル面の上下方向の変位を \( \zeta \) とする。
もし海水の運動が十分速くて海水が平衡状態になっており,
地球の変形や海水の移動によるポテンシャルの変化が無視できるとすると,
海面は潮汐力による等ポテンシャル面の変位に追従して \( \zeta \) だけ上昇することになる。
いま式 (12) で \( r=R+\zeta \) と置き,
\( \zeta \) が \( R \)
に比べて十分小さいとすると,
\[
V' \approx - \frac{{GM}}{R}\left( {1 - \frac{\zeta}{R}} \right) - \frac{{Gm}}{{2{a^3}}}\left[ {\frac{{3{{\left( {{\boldsymbol{a}} \cdot {\boldsymbol{R}}} \right)}^2}}}{{{a^2}}} - {R^2}} \right]. \tag{14}
\]
これが \( - GM/R \) と等しいことより,
等ポテンシャル面 (平衡潮汐海面) の上昇はつぎの式のようになる。
\[
\zeta = \frac{{m{R^4}}}{{2M{a^3}}}\left[ {\frac{{3{{\left( {{\boldsymbol{a}} \cdot {\boldsymbol{R}}} \right)}^2}}}{{{a^2}{R^2}}} - 1} \right]. \tag{15}
\]
 |
|
図3. 自転する地球に固定した座標系。
観測点の緯度を \( \lambda \),
月の赤緯を \( \delta \),
月の時角を \( H \) とする。
|
式 (13) では, ある瞬間での月の方向を基準とする座標系を使ったが,
ここでは地球に固定した座標系を使うことにしよう。
この場合, 月の方向は一般に赤道面から外れることになる。
図3 のように, 観測点の緯度を \( \lambda \),
月の赤緯を \( \delta \),
月の時角 (観測点の経度から西向きに測った角度) を \( H \) とする。
観測点の子午線上の赤道方向を \( x \) とすると,
観測点の位置は \(
{\boldsymbol{R}} = (R\cos \lambda ,\,\, 0,\,\,R\sin \lambda ) \),
月の位置は \(
{\boldsymbol{a}} = (a\cos \delta \cos H,\, - a\cos \delta \sin H,\,\,a\sin \delta ) \)
と書ける。
これらを式 (15) に代入し三角関数を整理すると, 等ポテンシャル面の上昇の式はつぎのようになる。
\[
\zeta = \frac{{3m{R^4}}}{{4M{a^3}}}\left[ {{{\cos }^2}\lambda {{\cos }^2}\delta \cos 2H + \sin 2\lambda \sin 2\delta \cos H + 3\left( {{{\sin }^2}\lambda - \frac{1}{3}} \right)\left( {{{\sin }^2}\delta - \frac{1}{3}} \right)} \right]. \tag{16}
\]
上式の角度のうち, 時角 \( H \) は地球の自転に伴って1日あたり \( 2\pi \) ほど変化する。
したがって, 第1項は半日周潮 (ほぼ半日周期の潮汐) を表す。
第2項は日周潮 (ほぼ1日周期の潮汐) で, 月の赤緯 \( \delta \) が 0 でないときに現れる。
この日周潮のため, たとえば月が赤道よりも北に寄っている場合, 北半球では月が地平線上にあるときの満潮は高く地平線下にあるときの満潮は低くなる。
第3項は極方向への長周期の変形を表す。
黄道の赤道面からの傾きと白道の黄道面からの傾きに伴う月の赤緯 \( \delta \) の変動によって, 13日半ほどの周期と半年の周期でゆっくりと変化する (図4 参照)。
もし海面がポテンシャルどおりに変形するのであれば, 海面の上昇はこの式で記述できる。
しかし, 実際の海水の運動は, 海水の応答の遅さと海水が受ける抵抗, 地形とコリオリ力の影響などのため, きわめて複雑だ。
 |
 |
 |
| (1) 半日周潮 |
(2) 日周潮 |
(3) 長周期潮 |
| 図4. 3種類の潮汐。(1), (2)の画像クリックでアニメーション。 |
戻る
T. Fujiwara, updated 2022/08, 2023/05